| IN A NUTSHELL |
|
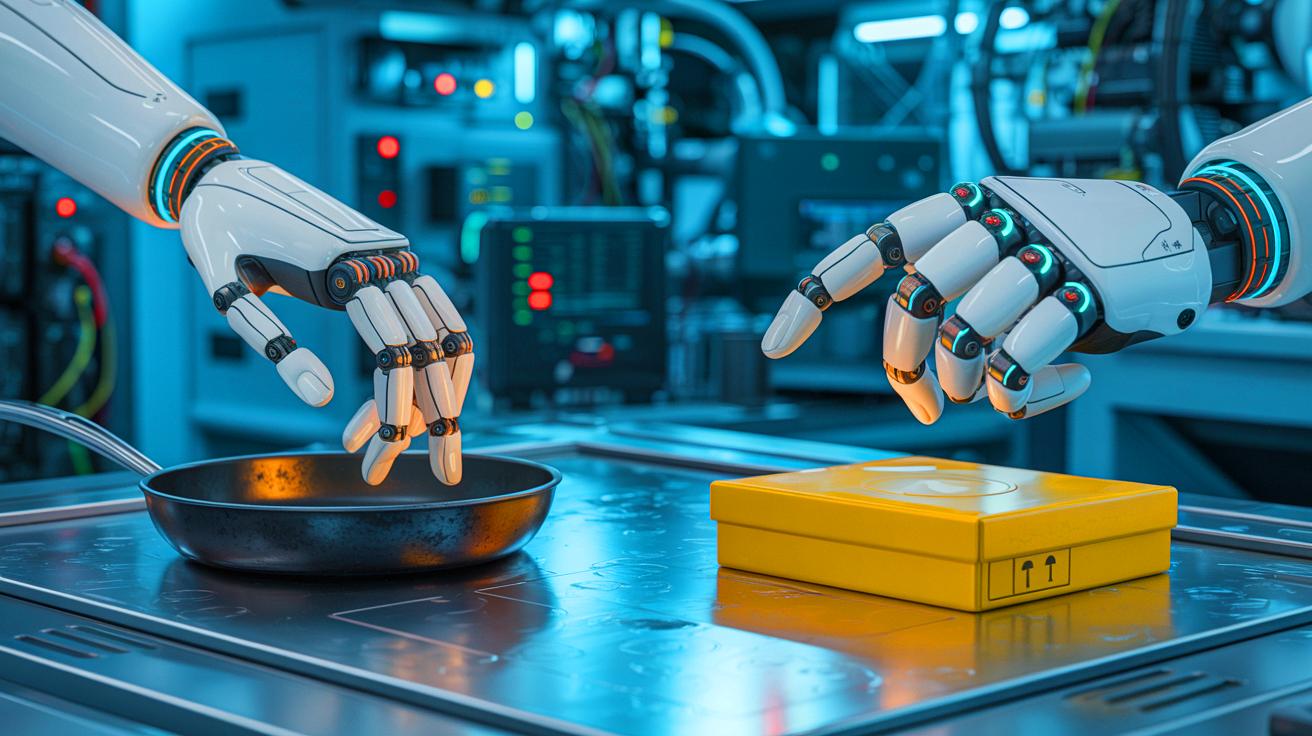
In the ever-evolving landscape of robotics, the development of the MOTIF Hand by a team at USC Viterbi represents a remarkable leap forward. This innovative robotic hand, guided by assistant professor Daniel Seita, is designed to emulate the nuanced ways humans interact with their environment. By integrating sensors for force, temperature, and motion, the MOTIF Hand aims to make robots more intuitive and capable of performing tasks that are challenging to automate. This progress exemplifies the merging of human instincts with robotic precision, setting a new standard in robotic technology.
The Breakthrough of Multimodal Sensory Input
The MOTIF Hand stands apart from traditional robotic grippers by its ability to process multiple sensory inputs simultaneously. Unlike its predecessors, this hand can respond to pressure, temperature, and motion, mimicking the human approach to object interaction. This multimodal capability allows the robotic hand to handle tasks that demand a delicate touch, such as pressing with precision or identifying a hot surface. The underlying principle echoes how humans, from a young age, learn to interact with their surroundings. The MOTIF Hand’s design incorporates a thermal camera in its palm, enabling it to detect heat without direct contact, much like a person might hover a hand near a hot object to gauge its temperature.
Additionally, the MOTIF Hand is equipped with force sensors that allow it to apply the exact amount of pressure necessary to push or hold objects. This feature is particularly valuable in manufacturing settings, where precision can be the difference between success and failure. As Seita explains, the goal was to imbue the robot with the same intuitive understanding that humans possess when approaching potentially dangerous tasks. The inclusion of an infrared-based camera to provide the hand with heat vision is a testament to the innovative thinking driving this project.
Flick, Shake, and Sense Like a Human
In a bid to make robots more human-like in their interactions, the MOTIF Hand employs a unique method to sense weight. By flicking or shaking an object, it can ascertain its contents, akin to how a person might assess whether a bottle is full. Hanyang Zhou, a key contributor to the project, emphasizes that while humans cannot visually discern force, they can feel it. This approach adds a layer of human mimicry that enhances the hand’s functionality, allowing it to tackle tasks that require a tactile understanding of an object’s properties.
The development of the MOTIF Hand builds upon earlier achievements in the field. It draws inspiration from the LEAP Hand, a 2023 project from Carnegie Mellon University, which was also open-source. By making the MOTIF Hand open-source, Seita and his team are promoting collaboration across the robotics community, encouraging other researchers to build upon their work. This spirit of openness is crucial for advancing the field and fostering innovation.
Collaborative Research and Open-Source Development
The decision to open-source the MOTIF Hand is a strategic move aimed at accelerating advancements in robotics. By sharing their findings and designs, the USC Viterbi team hopes to catalyze further research and development. Seita believes that open-source projects are vital for the growth of the robotics community, enabling researchers to refine and expand upon existing work. Zhou echoes this sentiment, viewing the MOTIF Hand not as a standalone project but as a foundation for future innovations.
The publication of their research in Arxiv marks an important step in disseminating their findings to a wider audience. It underscores the team’s commitment to transparency and collaboration, positioning the MOTIF Hand as a pivotal development in robotic technology. The hope is that by making the design accessible, other teams will enhance and adapt it, driving the field forward in new and unexpected ways.
“Humanoid Robots Adam And Adam-U Show Lifelike AI Movement”: Experts Call It A Game Changer
Implications and Future Directions
The implications of the MOTIF Hand’s capabilities extend beyond mere technological advancement. It represents a shift towards more intuitive and adaptable robotic systems, with the potential to revolutionize industries reliant on automation. As robots become more capable of mimicking human interactions, their applications in sectors such as manufacturing, healthcare, and service could expand significantly. The MOTIF Hand’s ability to perform complex tasks with a level of human-like understanding is a harbinger of what may come as technology continues to evolve.
Looking ahead, questions remain about how such advancements will shape the future of robotics and their integration into daily life. As development continues, how will society adapt to these increasingly human-like machines? What ethical considerations will arise as robots become more autonomous and capable? These questions highlight the importance of ongoing dialogue and research as we navigate the intersection of technology and humanity.
This article is based on verified sources and supported by editorial technologies.
Did you like it? 4.4/5 (26)